





Dual quick changer
Dual gripping, more power for twice the work
Dual quick changer for double speed cycle time can improve productivity by 50% or more. Increased productivity offers faster payback, with ROI in as little as 3 months. Increased up-time in CNC machine tending.
1,840.00€
Payload up to 20 kg
OnRobot’s Dual Quick Changer can handle workpieces that combined weigh up to 20 kg
High repeatability
Ideal for CNC machine tending to speed up cycle time
ISO-9409-1 flange
Can be used on any robot arm, drone, or other equipment with an ISO-9409-1 flange
Safe and secure locking mechanism
Patented, reliable and easy-to-use locking mechanism. Enables simple and fast locking and unlocking, letting even unexperienced operators change the robot’s EoAT in a few seconds.
Easy and fast tool changing
Allowing robot operators to quickly change tooling in addition to eliminating downtime between various processes.
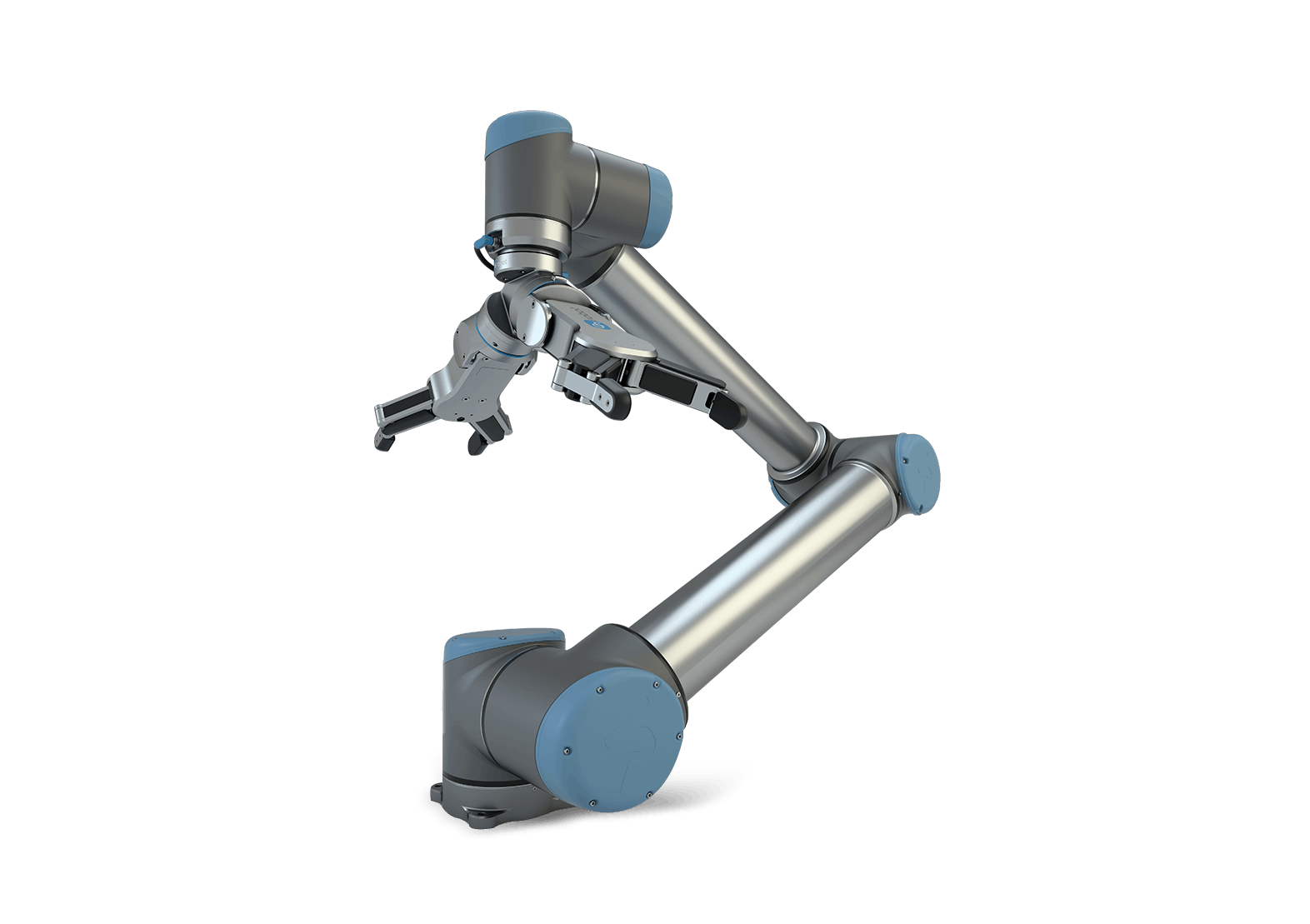
Collaborative Applications with RG2, RG6 and Dual Gripper
Applications

Surface Finishing

Quality testing & Inspection

Assembly

Packaging & Palletizing

Machine Tending

Pick & Place

Robot kit
Essential accessories to make onRobot gripper work with other then UR robots.
615.00€
Compatible robots

Doosan

Fanuc

Hanwha

Kawasaki robotics

KUKA

Nachi

TM Robot

Universal Robots

Yaskawa
Features
Dual Quick Changer
The Dual Quick Changer enables you to use our end-of-arm tools together in a single cycle and can improve productivity by 50% or more.
Increased productivity offers faster payback and increased up-time in CNC machine tending.

Easy deployment
Easy deployment with out-of-the box grippers reduces programming time by 70%.
Plug & Produce
Plug & Produce design reduces deployment time from a day to an hour.
Technical specification
Weight
0.41 kg
General Properties
Operating life (Robot operation)
minimun 10 M cycles
Operating life (Tool change)
typical 5.000 cycles
IP Classification
64
Repeatability
maximum ±0.02 mm
Rated payload
maximum 20 kg
Permissible torque
maximum 50 Nm
Permissible force
maximum 400 N
Downloads
Related products
view all products
RG2 gripper
2kg payload flexible 2 finger robot gripper with wide stroke
3,530.00€

HEX-E 6-axis force-torque sensor
High Precision force-torque sensor - giving the sense of touch to your robot
2,960.00€

Quick changer
Quick changer - easy and fast tool changing
860.00€

Robot kit
Compute box
615.00€
Related videos
view all videos
OnRobot Dual RG2 gripper at ...
The Dual RG2 is used at Grenaa’s high mix low volume production…

Automate CNC Machine Tending with ...
To meet the growing market demand, FT-Produktion turned to specialised robot technology…

OnRobot One System Zero Complexity
OnRobot Takes Robot Compatibility to the Next Level with the OnRobot One-System…

OnRobot CEE Partner Event, Warsaw, ...
OnRobot CEE Partner Event, Warsaw, September 2019
Related posts
view all blogpostsOnRobot Quick Changer – faster deployment of robotic ...
The Quick Changer is a physical interface between the robotic arm and the EoAT, that allows for easy and fast tool changing.
Innovative collaborative machine tending saves time in manufacturing
The recommended tools for machine tending are RG2 and RG6 dual grippers. These industrial grippers attach easily to the end of a robotic arm ...
A unified robotic system? OnRobot just took another ...
OnRobot new one robot system solution speeds deployment and reduces downtime, so you save time and money while quickly realizing the benefits of automation ...
Flexible grippers deliver the future of automation today
The grippers know the correct angle, precision and force to apply while handling an object before the task even begins.