




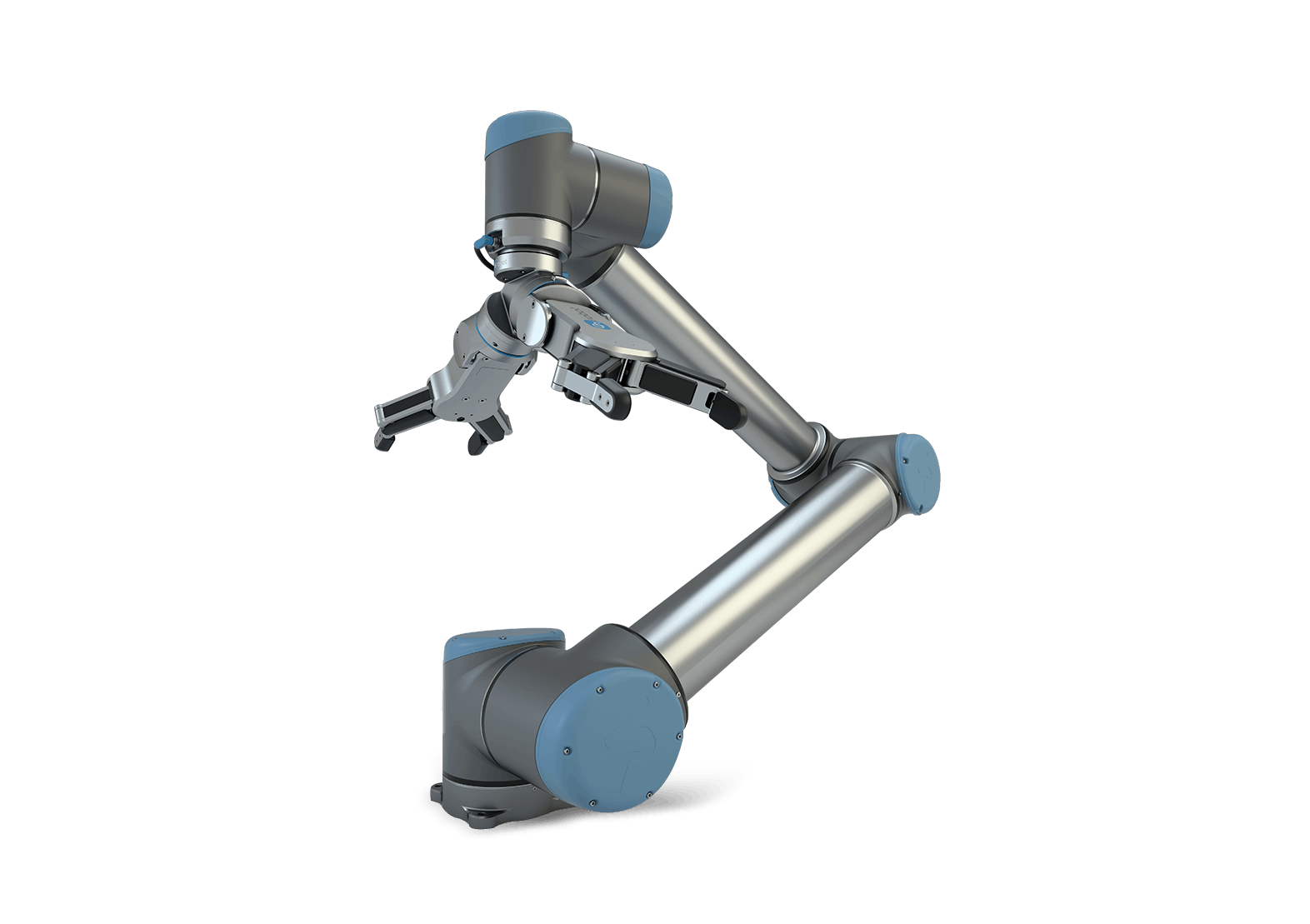
HEX-H 6-axis force-torque sensor
Low Deformation sensor - giving the sense of touch to your robot
6-axis force-torque sensors provide accurate force and torque measurements along all 6 axes. This gives you precise control when it comes to difficult assembly, polishing, sanding or deburring jobs. Additionally, the HEX software includes path recording, force control and special features for insertion tasks. This means reduced integration time for your production line. Designed to fit most of the current industrial robot arms. Common applications are polishing, sanding, deburring, grinding and assembly, but it can also be used for teach-in and crash detection.
- Flexible sensor extends automation possibilities to processes that weren’t previously possible
- High-accuracy sensor technology provides 95% better quality in insertion and assembly tasks.
- Easy programming gets even complex polishing tasks up and running in less than a day
2,960.00€
Easy hand guiding, path recording
You can record complex paths within minutes
High accuracy
Precise force/torque measurement on 6 axis (Fx,Fy,Fz,Tx,Ty,Tz)
Advanced force control
Keeps constant speed and force while moving
Easy to install graphical user interface, fast programming
You can start your application development within an hour
Unique optical based technology
Compared to other technologies the unique OnRobot sensor technology generally much more robust, can resist sudden shocks.
Integrated software
The gripper comes with pre-integrated software that is easy to install and program, so even employees with no technical background can set it up.
OnRobot HEX Polishing Application at Automatica 2018
Applications

Surface Finishing

Quality testing & Inspection

Assembly

Packaging & Palletizing

Machine Tending

Pick & Place

Robot kit
Essential accessories to make onRobot gripper work with other then UR robots.
615.00€
Compatible robots

Doosan

Fanuc

Hanwha

Kawasaki robotics

KUKA

Nachi

TM Robot

Universal Robots

Yaskawa
Features
Easy deployment
Easy deployment with out-of-the box grippers reduces programming time by 70%.
Plug & Produce
Plug & Produce design reduces deployment time from a day to an hour.
Technical specification
General Properties
IP Classification
67
Crosstalk (typical)
Fxy - < 5 % | Fz - < 5 % | Txy - < 5 % | Tz - < 5 %
Hysteresis (measured on Fz axis, typical)
Fxy - < 2 % | Fz - < 2 % | Txy - < 2 % | Tz - < 2 %
Full scale nonlinearity
Fxy - < 2 % | Fz < 2 % | Txy - < 2 % | Tz - < 2 %
Noise-free resolution (typical)
Fxy - 0.5 N | Fz - 1 N | Txy - 0.036 Nm | Tz - 0.008 Nm
Signal noise (typical)
Fxy - 0.1 N | Fz - 0.2 N | Txy - 0.006 Nm | Tz - 0.002 Nm
Single axis deformation at N.C (typical)
Fxy - ± 0.6 mm | Fz - ± 0.25 mm | Txy - ± 2 °| Tz - ± 3.5 °
Single axis overload
Fxy - 500 % | Fz - 400 % | Txy - 300 % | Tz - 300 %
Nominal Capacity (N.C)
Fxy - 200 N | Fz - 200 N | Txy - 20 Nm | Tz - 13 Nm
Logistic data
Weight (with built-in adapter plates)
0.35 kg
Dimensions (H x W x L)
50 x 71 x 93 mm
Operating Conditions
Relative humidity (non-condensing)
maximum 95 %
Calculated MTBF (operating life)
minimun 30.000 Hours
Operating temperature
maximum 55 °C
Power consumption
maximum 0.8 W
Power supply
minimun 7 maximum 24 V
Related products
view all products
RG2-FT Smart gripper
Smart robot gripper with in-built force/torque and proximity sensor
7,540.00€

HEX-E 6-axis force-torque sensor
High Precision force-torque sensor - giving the sense of touch to your robot
2,960.00€

Quick changer
Quick changer - easy and fast tool changing
860.00€

Robot kit
Compute box
615.00€
Related videos
view all videos
OnRobot HEX Clutch Insertion Application ...
OnRobot HEX Clutch Insertion Application at Automatica 2018

OnRobot HEX Deburring Application at ...
Adding a force-torque sensor to your robot makes it easy to teach…

OnRobot HEX and RG2 Ram ...
Electronic Assembly with our collaborative application. Ram Insertion with OnRobot Force/Torque sensor…

OnRobot RG2 and HEX Stacking ...
Pick and place different sizes of chips with OnRobot RG2 combined with…
Related posts
view all blogpostsHelpful torque sensors – when automation needs a ...
Haptic force/torque sensors offer companies the opportunity to increase their production efficiency in many areas of application to a significant degree.
Intelligent automation requires sense of touch for fewer ...
In addition to specific new automation capabilities, a sense of touch in robots can also represent a strategic advantage for companies.
Sensors can ensure competitive advantage
The use of haptic sensors for industrial robots immediately offers several essential competitive advantages.
Brilliant polishing with a sense of touch
With haptic force/torque sensors, the robot arms can detect the slightest force exerted and resistance encountered, and react accordingly in real time. The polishing ...